随着工业自动化、服务机器人等领域的快速崛起,机器人在复杂动态环境中的自主避障能力成为制约其规模化落地的核心瓶颈。当前市场上的避障方案普遍存在“感知精度不足”“场景适应性弱”“语义理解缺失”三大痛点:纯视觉依赖方案易受光照、遮挡影响,在强光或昏暗环境下避障成功率大幅下降;单一深度感知方案虽能获取距离信息,却无法区分“行人”“设备”“临时障碍物”等语义类别,易出现误判;而融合类方案多依赖高端传感器组合,导致硬件成本居高不下,难以适配中小型机器人厂商的轻量化需求。在此背景下,兼具高精度、全场景适配与轻量化优势的避障技术成为行业迫切需求。

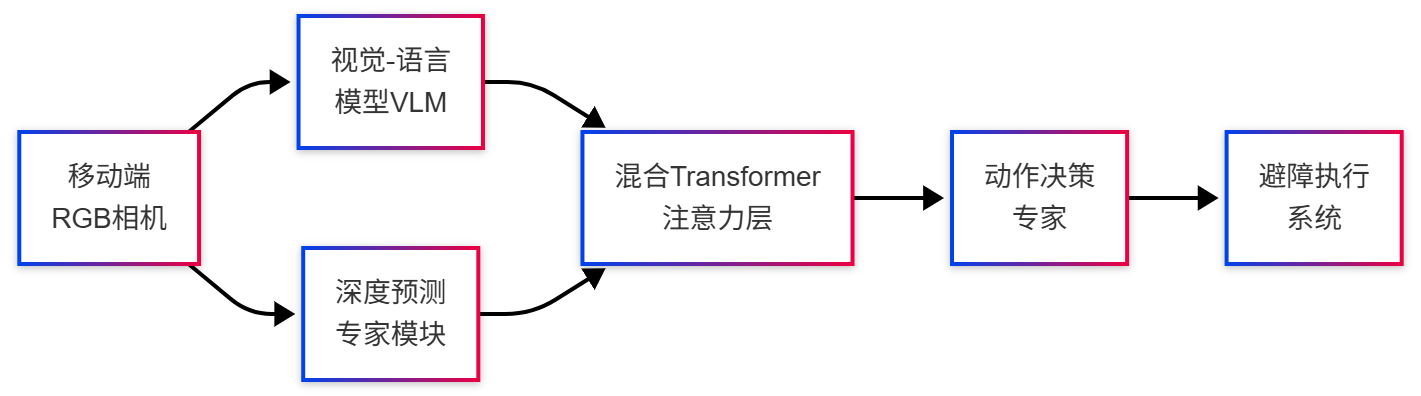
融合视觉语义理解与毫米级深度感知,实现从 “被动避障” 到 “主动预判” 的跨越。
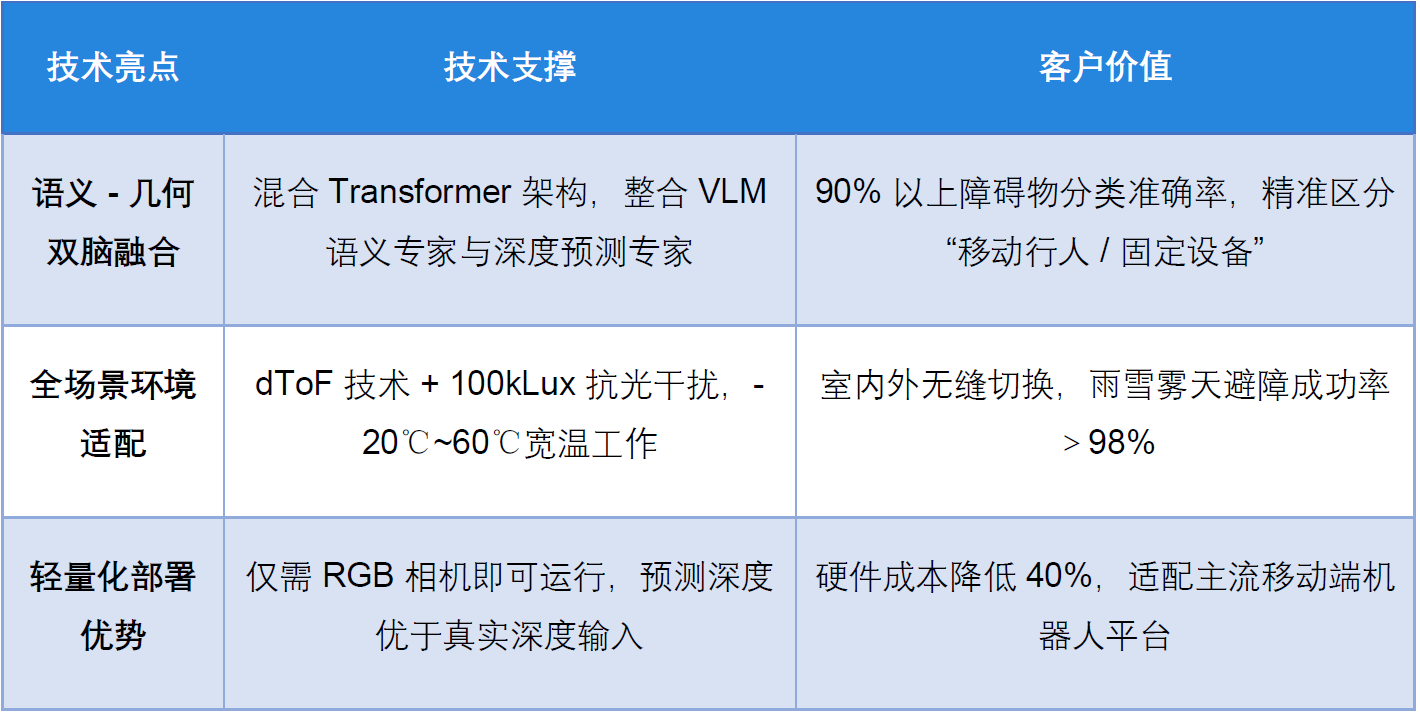
毫秒级响应:120ms内完成“感知-决策-执行”闭环
厘米级精度:≤3cm距离测量误差,支持0.1mm级精密操作
多机协同:dToF芯片优化,支持10台设备同步工作无干扰
典型应用场景