拉斯维加斯的一月,CES 再次成为全球科技的风向标。在 2026 年的展馆内,一个显著的趋势正在清洁电器赛道上演:随着扫地机器人在清洁能力、导航避障技术上已趋于成熟,单楼层清洁的体验已近乎完美。然而,对于全球数以千万计的多层住宅用户而言,这还不够。
这种需求的演变并非技术激进主义的自我狂欢,而是消费痛点的自然生长。数据显示,在北美,87.7% 的多层住宅为两层结构;在欧洲,90% 以上的多层住宅采用复式设计 。长期以来,用户不得不面对“一层一台机器”的冗余配置,或是人工搬运的繁琐。当“解放双手”的最后一块拼图——纵向维度的跨越——被摆上台面,如何让机器人安全、高效、通用地跨越台阶,成为了检验企业机电一体化能力的试金石。

在本次 CES 上,继 IFA 首次国际亮相后,追觅 Cyber X 以更成熟的姿态二次登场,与同台竞技的石头 G-Rover 分别代表了两种截然不同的解题思路。这不仅是产品的对垒,更是两种工程哲学的深度碰撞。
01追觅 Cyber X:分体平台化的机械工程逻辑
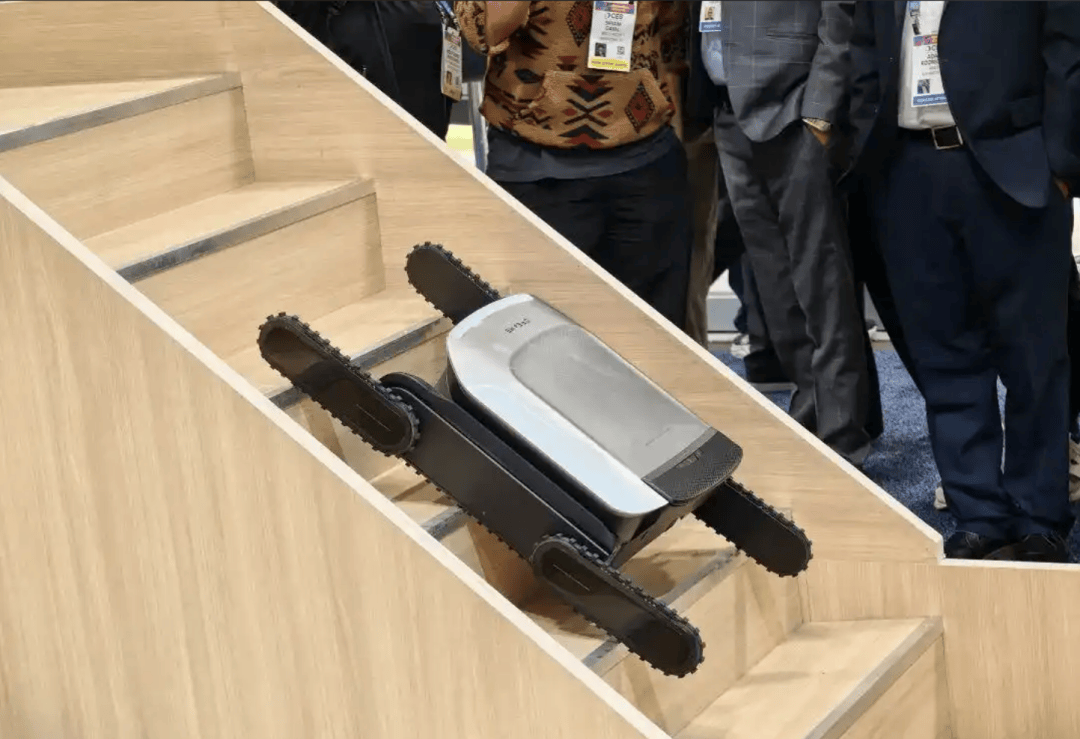
作为第二次在国际舞台展示的成熟方案,追觅 Cyber X 并没有急于改变形态,而是进一步打磨了其独创的“分体平台式”设计。其核心逻辑在于“术业有专攻”:通过一个专属的智能载具来解决复杂的越障问题,从而保证清洁本体的形态优势。
这一方案的技术底座,是其底部那套精密的“仿生六足三段式履带爬楼系统” 。这并非简单的履带堆叠,而是一套如同精密钟表般咬合的机电协同装置。当机器面对楼梯时,自带的 3D ToF 传感器配合独立算力平台,会在毫秒间对环境进行三维建模,精确还原台阶的高度、坡度及宽度,做到“未动先知” 。

随后,六足关节联动驱动前腿主动抬起,像登山者一样精准攀附至高一级台阶 。这里隐藏着一个极具巧思的细节:履带表面采用了特制的深齿轮设计,当履带接触台阶直角时,这些齿隙能像齿轮啮合一样死死卡住台阶边缘,形成第一道物理防滑屏障。紧接着,后腿支撑于低阶台阶,通过蹬直动作提供向上的推力,配合高韧性橡胶履带提供的持续静态摩擦力,机身实现了类似坦克的连续滚动攀爬 。这种设计让 Cyber X 拥有了惊人的 0.2 米/秒的移动速度,爬一层楼仅需约 27 秒,整个过程如履平地,丝滑而连贯 。
02石头 G-Rover:一体集成化的轮足复合尝试
与追觅的“稳健”不同,石头科技展示的 G-Rover 则选择了一条“一体集成式”的技术路径。这是一款轮腿复合式产品,设计灵感似乎源自火星探测车,试图在一个机身上整合移动与越障功能。

其技术实现主要依赖于一套可变构的悬挂系统。在平地清洁时,四肢收缩依靠轮子移动;遇到楼梯时,悬挂伸展将轮子转化为支撑腿,通过“逐级跨越”的方式上楼。由于没有履带那样的大面积接触面,G-Rover 在爬楼过程中主要依靠传感器回传数据,配合动态平衡算法来维持机身的重心稳定,防止倾覆。

这种设计虽然赋予了机器在爬升过程中“边爬边扫”的可能性,但是效率较低,也对算法的实时响应能力提出了极高的要求。它试图用软件算法的算力去弥补物理接触面积的不足,在工程实现上无疑是一次大胆的探索。
03研判:为何 Cyber X 是当下的“最佳解法”
技术路线的选择没有绝对的对错,但在商业化落地与用户价值层面,却存在优劣之分。当我们抽丝剥茧,从安全性、兼容性、体验完整度以及战略价值四个维度进行深度对比时,会发现追觅 Cyber X 凭借更成熟、稳健的方案,正在确立其作为“行业最佳解法”的地位。
首先,对于涉及重力势能的爬楼设备而言,安全是不可逾越的红线。

追觅 Cyber X 的设计哲学是“用机械结构的确定性对抗环境的不确定性”。除了履带本身的大面积静态摩擦力外,系统还内置了电机扭矩检测形成的“检测自锁”、涡轮蜗杆传动带来的“机械物理自锁”、以及下视传感器触发的“悬空回退” 。这构成了坚不可摧的三重制动防护系统。这意味着,即便在断电、地毯打滑或传感器短暂失效的极端工况下,机器也能利用物理特性死死“锁”在台阶上,实现静态防跌落 。
相比之下,石头 G-Rover 的轮足方案主要依赖算法维持动态平衡。虽然算法可以不断优化,但物理结构的先天特性决定了其在面对撞墙、越阶或地面摩擦系数突变时,容错空间相对较窄 。在家庭安全这一核心指标上,物理层面的“死锁”机制显然比算法层面的“平衡”机制更具鲁棒性,也更能让全球用户安心。
其次,全球住宅的楼梯形态千差万别,如何让一套设备适应所有的家,是量产最大的拦路虎。
石头 G-Rover 的一体化轮足结构受限于关节行程和机身尺寸,对楼梯环境有明确的物理限制。据评估,其适配的台阶高度通常需小于 18cm,且台阶进深需大于 30cm 。这意味着许多老式住宅的陡峭楼梯、或是设计感较强的狭窄旋转梯,可能无法使用。
而追觅 Cyber X 展现了惊人的适应性。其三段式履带设计通过连续的接触面,模糊了“台阶”的边界,将其简化为“坡度” 。它最高可攀爬 35cm 的台阶,几乎覆盖了所有家用楼梯及错层结构;同时,履带结构对台阶进深无特殊要求,即便是脚掌难以全踩的狭窄楼梯也能平稳通过 。这种“兼容任意台阶环境”的能力,使得 Cyber X 成为了目前市场上家庭适配性最高的爬楼产品,真正做到了不挑剔环境,让技术适应生活。
再者,分体与一体的抉择,本质上是对“清洁体验”的取舍。
石头 G-Rover 为了实现一体化爬楼,不得不将机身设计为厚重的方形。这种形态上的妥协带来了三个问题:一是难以进入床底、沙发底等低矮空间;二是方形机身在桌椅腿丛林中的脱困能力天然弱于圆形机身,三是产品自身结构已经冗余,只能舍弃了拖地模块。

追觅 Cyber X 坚持的“分体平台”策略,虽然增加了载具,但却保全了清洁本体的完美形态。其搭载的扫地机依然保持了最利于清洁的圆形薄款设计(高度仅 7.95-9.75cm),能够自由穿梭于低矮空间 。更重要的是,它没有牺牲任何清洁功能,扫、拖、洗、烘样样精通。
值得期待的是,虽然在本次 CES 上尚未展出,但据了解 Cyber X 未来将通过“协同吸尘”的方式支持楼梯表面清洁——即爬楼机与扫地机配合工作,填补了分体式方案在楼梯清洁上的最后一块拼图。这种“让专业的腿走最难的路,让专业的手干最细的活”的设计,确保了用户在享受爬楼便利的同时,清洁体验不打折。
最后,我们必须看到“技术长期主义”在资产价值上的体现。
电子消费品行业存在一个客观规律:清洁技术(吸力、算法)的迭代周期极短,而机械底盘技术(电机、结构)的迭代周期较长 。石头的一体化方案将两者强耦合,导致了一种“周期错配”。用户未来若想升级更强的清洁能力,必须连同昂贵的爬楼结构一起淘汰,这是一种“一次性买断”的短期消费逻辑。

追觅 Cyber X 则展现了极具远见的“平台化思维”。它将 Cyber X 定义为一个通用的、独立的“载具平台”。它不仅适配追觅当下的旗舰机型,也兼容 X60 以及未来双圆盘、履带、滚筒等多种形态的扫地机。这意味着,用户在未来更新扫地机时,无需为爬楼功能重复买单,只需更换清洁本体,底座依然可以复用。这种平台化设计,不仅极大地降低了用户全生命周期的拥有成本,更展现了追觅作为全球领导品牌,对资源节约和用户资产保值的责任感。
写在最后:
从 IFA 到 CES,追觅 Cyber X 的每一次亮相,都在向市场释放一个信号:爬楼机器人不再是概念车,而是即将驶入千家万户的量产车。Cyber X 之所以被视为目前市场上成熟度最高、功能最完善的爬楼产品,并非偶然。它是追觅基于对全球用户真实痛点的深度洞察——从北美别墅的楼梯高度,到欧洲老宅的台阶材质——进行数千次调研后得出的结论 。
追觅拒绝了看似炫酷但牺牲体验的一体化设计,坚持选择了这条更难、但更稳健、更具包容性的分体平台之路。这不仅解决了“怎么爬”的技术问题,更回应了用户“安不安全”、“好不好用”、“值不值得”的灵魂拷问。
结合追觅扫地机近年来在全球高端市场第一的优异表现,Cyber X 的推出无疑是对其“以用户为中心”品牌理念的最佳注脚。它证明了,真正的科技创新,不是为了改变用户的生活习惯,而是用最成熟、最稳健的方案,去温柔地消除生活中的每一个障碍。