今日,思岚科技(SLAMTEC)正式发布新一代全集成AI空间感知系统——AuroraS。有别于传统相机,AuroraS是一个集成了AI算法和配套算例的“空间智能感知系统”,旨在为具身智能机器人提供开箱即用的强大空间感知能力,大幅降低集成开发门槛。

思岚科技新款AI空间感知系统AuroraS
一、从“传感器”到“感知系统”的升维
AuroraS最大的革新在于高度集成化。它带有思岚自研的深度学习AI-VSLAM算法提供全3D的地图构建和定位能力以及端到端神经网络的双目深度估计和语义识别能力,而所需的算力硬件,全部集成于仅238克的紧凑机身内。
对开发者意味着什么?
●极大降低门槛:无需额外配置算力,无需从头开发复杂的视觉算法。
●加速上市时间:提供开箱即用的高精度3D感知、建图与语义理解能力,让开发者能聚焦于机器人上层应用的创新。
●简化系统设计:一体化的设计极大简化了机器人的结构设计与电源管理。

AuroraS带来的不仅是技术参数提升,更是一种开发范式的转变:让复杂的空间感知,变得像使用一个普通摄像头一样简单。
二、为何AuroraS是“具身智能”的理想之选?
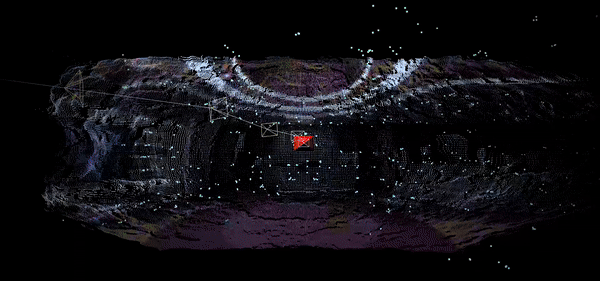
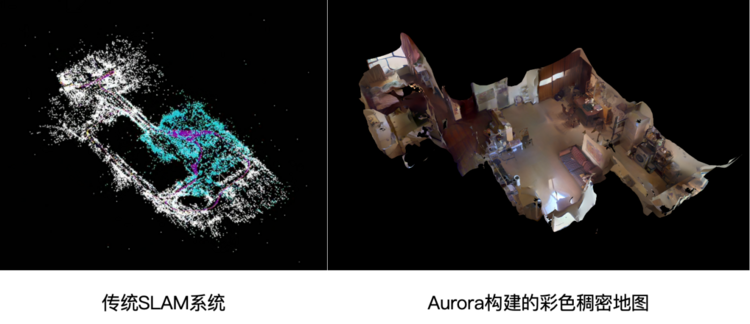
1.PhotoReal真景地图:从“点云”到“真景”的跨越
与传统SLAM只能输出稀疏、抽象的点云不同,AuroraS能生成带有真实色彩纹理的稠密3D地图。结合实时语义标注,机器人不仅能知道“这里有一堵墙”,更能知道“这是一扇白色的门”或“那是一个沙发”。这才是具身智能与环境交互所需的世界模型。
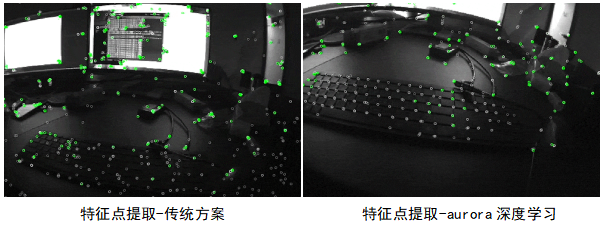
2.新一代AI-VSLAM:无惧苛刻场景的稳定性
基于自研的深度学习模型,AuroraS的VSLAM能力在传统方案容易失效的场景下表现卓越。
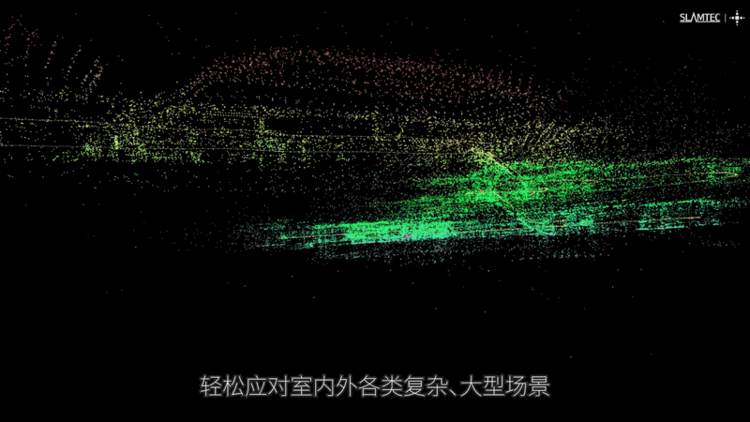
基于深度学习方案的思岚AI-VSLAM可以应对各类复杂室内外场景,稳定工作。
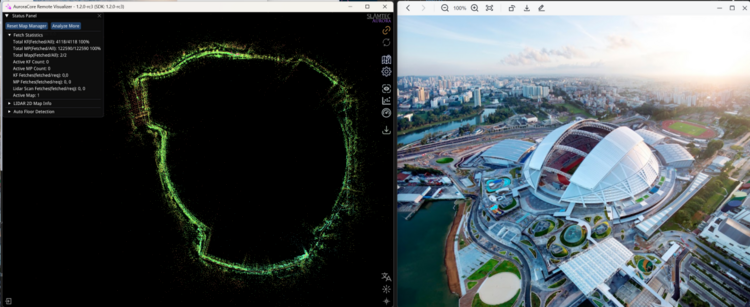
新加坡体育馆75,000平方米室外建图
实时闭环修正:内置在线闭环检测与重定位功能,能自动修正建图累积误差,确保长期运行的可靠性。
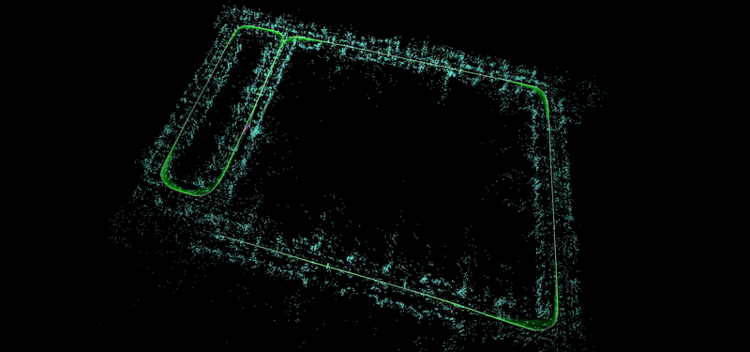
AuroraS内置的实时闭环修正和图优化引擎
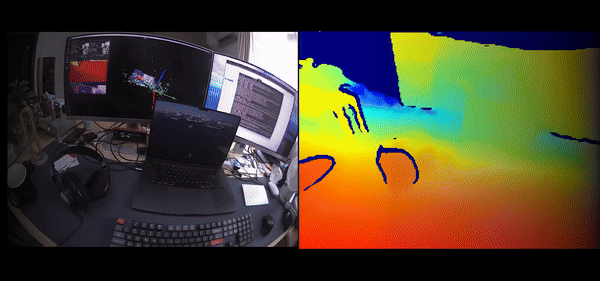
3.强大的多模态感知:双目深度+AI语义
稠密深度感知:120°超广角双目视觉,提供高质量的深度点云,满足实时避障与3D重建需求。
像素级语义理解:可实时识别超过18类室外场景和80类室内物体,为机器人执行视觉语言导航(VLN)等高级任务提供了底层数据支撑。

三、广泛的应用前景
AuroraS的强大性能使其能赋能千行百业:
具身智能:为人形机器人、四足机器人提供核心视觉感知
户外机器人:赋能割草机、智慧农业机器人,应对复杂非结构化环境
工业自动化:提升AGV/AMR在动态车间环境下的智能水平
数字孪生:高效进行3D场景重建,采集VLN/VLA训练数据
低速无人驾驶:服务于园区物流、安防巡检机器人

四、开放易用,加速创新:强大工具链让开发事半功倍
思岚科技为AuroraS配备了完善的工具链,确保开发者能够最大限度地发挥其潜能。
AuroraRemoteUI可视化工具:提供直观的图形界面,无需编写代码即可实时预览稠密3D地图、实时语义分割效果,并可轻松进行地图管理、参数配置与系统状态监控,极大简化了调试与演示流程。
AuroraRemoteSDK:提供对C++、ROS1/ROS2、Python等主流平台和语言的支持,让开发者能够灵活集成,并快速实现稠密建图、语义地图构建、3D高斯泼溅(3DGS)场景重建等高阶功能。

可以快速接入各类3DGS(高斯泼溅)框架,实现全新的3D重建能力
使用AuroraS的预生成地图和数据,可以一键导出用于进行3DGS以及其他目前行业前沿3D重建框架所支持的输入数据集,实现对于目前SOTA模型和工作成果的评估和进一步研究工作。同时,生成的相关模型文件也可以轻松导入诸如Nvidiaomniverse框架,进行VLA/VLN所需的真值数据或者进行sim-to-real训练。
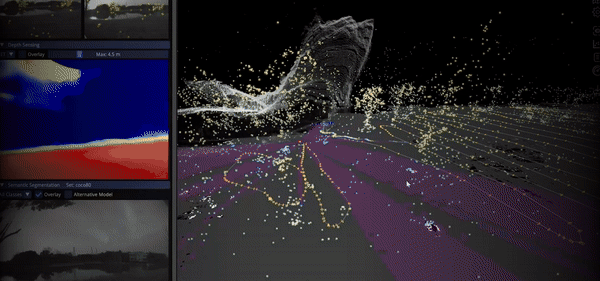
使用Aurora快速实现3DGS场景重建
思岚科技AuroraS的发布,标志着机器人感知技术从“功能机”时代迈向了“智能机”时代。它通过全集成、AI驱动、多模态融合的设计,解决了困扰行业已久的集成难度高、环境适应性差、智能水平不足等核心痛点。
我们相信,AuroraS将成为推动具身智能从实验室走向大规模商业化应用的关键基石。未来已来,思岚科技邀您携手,共同开启机器人感知的新篇章!
●了解更多:访问思岚科技官网,查看AuroraS详细技术参数与数据手册。