10月3日凌晨,一条来自大洋彼岸的演示视频在中国科技圈炸开了锅。
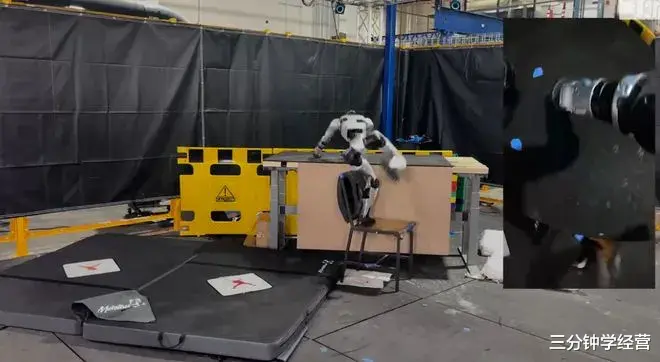
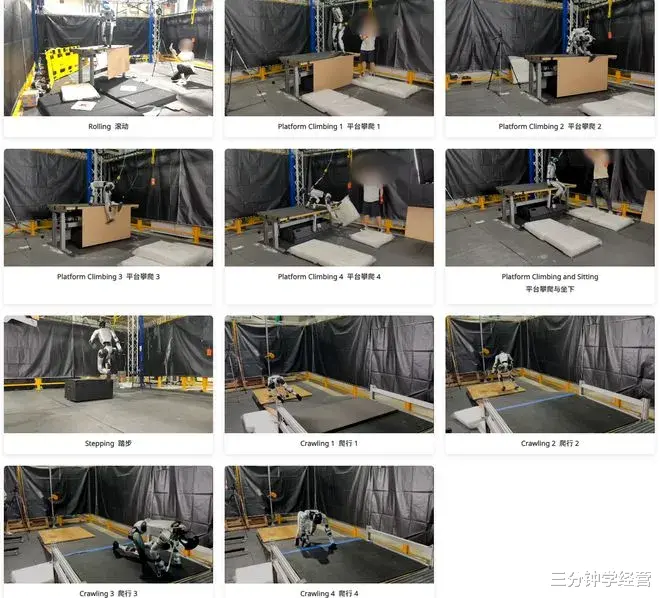
画面里,宇树科技的G1人形机器人正在完成一个看似简单却令人惊叹的动作序列:它搬起一把椅子走到桌边,把椅子当作踏板爬上桌面,然后纵身跃下,用一个教科书般的翻滚动作化解落地冲击。
整个过程流畅得仿佛经过千百次排练,更令人震撼的是——这台机器人没有依赖任何视觉传感器或激光雷达,全程靠"本体感觉"完成30秒的复杂任务。
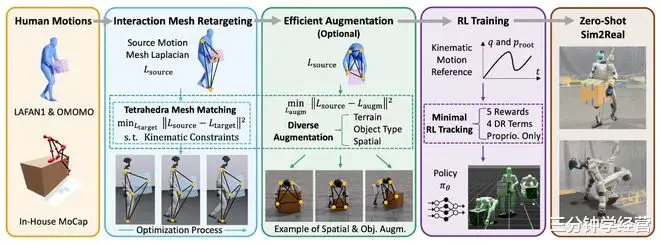
这项技术突破来自美国亚马逊FAR、麻省理工、加州大学伯克利分校、斯坦福大学、卡内基梅隆大学等机构联合发布的OmniRetarget引擎。
它的特殊之处在于,将人类动作"翻译"成机器人能理解的运动指令时,不再像传统方法那样生硬地套用轨迹,而是通过交互网格技术保留了人与物体、环境之间的微妙关系。
研究团队生成了超过9小时的运动轨迹数据,仅用5个奖励项就训练出了能执行跑酷和操作任务的策略。
这或许解释了为什么演示视频中的G1能展现出8种风格迥异的搬箱方式:
●单手提
●双手抱
●侧身扛
●低身搬
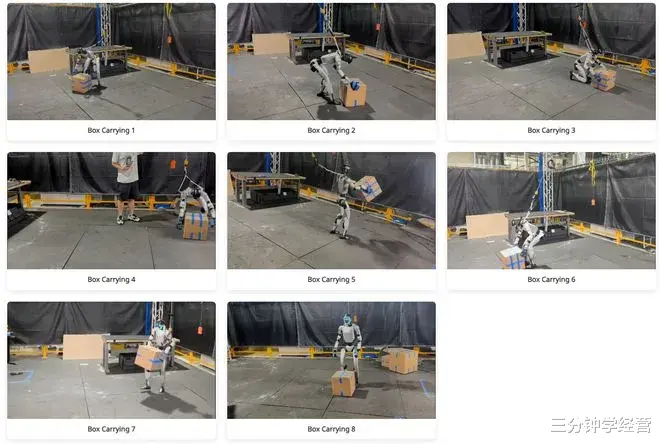
每一种都精准适配不同的场景需求。机器人第一次真正理解了"怎么搬"比"能不能搬"更重要。
但更值得玩味的是这场技术突破背后的合作模式。美国顶尖高校提供算法,中国企业贡献硬件平台,成果却在全球范围内开源共享。在当下地缘政治的微妙氛围中,这种合作显得既理想主义又充满现实考量。
从挂科生到机器人教父,王兴兴走了一条最笨的路王兴兴,1990年出生于浙江宁波余姚,本科毕业于浙江理工大学机电专业,后在上海大学攻读机械工程硕士。这个履历看起来平平无奇,然而,其成长轨迹中不乏转折——他曾因英语成绩差无缘浙江大学,大学期间做出的第一台双足机器人"颤颤巍巍",远未臻于完美。

2016年,王兴兴在上海大学硕士期间开发了纯电驱动四足机器人XDog,这款机器人吸引了一些早期投资人的关注。毕业后他进入大疆工作,不久后辞职创办了宇树科技。当时的四足机器人市场被波士顿动力的Spot牢牢占据,但王兴兴看到了另一条路——让高性能机器人变得"人人买得起"。
2021年发布的Go1机器狗搭载12个电机,每个能产生23.7Nm扭力,售价却只有竞品的几分之一。这个定价策略背后是一个精心设计的巧妙生态策略:硬件开放给全球研究者,算法创新反哺硬件迭代。

2021年底,麻省理工学院学者莱克斯·弗里德曼与马斯克的播客访谈中,一只宇树机器狗爬在桌上——那或许是宇树科技全球化布局最好的广告。
2025年蛇年春晚,宇树H1系列人形机器人以群体表演成为科技亮点。2月17日的民营企业座谈会上,35岁的王兴兴与任正非、雷军、马云等同坐第一排。从实验室到春晚舞台,从学生创业到国家战略,王兴兴用9年时间完成了中国机器人产业最快的阶层跃迁。
但他走的路却是最笨的那条——每年迭代,每次进步20%,把时间拉长到足够长。他在上海大学新生演讲中坦言早期作品"与完美无关",秘诀就是每年进步20%的复利公式。
中国硬件遇见美国算法,这场婚姻有多脆弱?OmniRetarget选择宇树G1作为测试平台并非偶然。在人形机器人硬件领域,特斯拉Optimus尚未大规模开放,波士顿动力Atlas价格高昂且限制重重,中国企业的开放策略反而成为全球算法研究者的首选。
王兴兴在接受新华社采访时表示,人形机器人在工业和商业上的应用会比家用更快,因为在人和机器保持适当距离的前提下更容易发展。这个判断揭示了当前技术突破的真实处境——实验室的酷炫演示与商业化落地之间,仍横亘着成本、可靠性、场景适配的三重鸿沟。
高工机器人产业研究所预测,2025年全球人形机器人市场销量有望达到1.24万台,市场规模63.39亿元。TrendForce预计2025年中国市场人形机器人本体产值有望突破45亿元人民币。这些数字看起来诱人,但对比特斯拉动辄千亿美元的估值预期,人形机器人的商业化故事仍处于起步阶段。
更微妙的是中美技术合作的脆弱平衡。开放硬件平台吸引算法创新,算法验证反哺硬件迭代——这个正向循环建立在学术自由与产业竞争暂时不冲突的前提上。但随着人形机器人从实验室走向工厂车间,从科研工具变成生产力要素,技术民族主义的幽灵随时可能打破这种默契。
王兴兴或许也意识到了这种风险。宇树科技在开放硬件的同时,正在加速自研算法能力的布局。2025年6月,王兴兴获香港特别行政区行政长官李家超委任为特首顾问团成员——这个身份暗示着企业战略已经超越单纯的技术竞赛,开始考虑更复杂的政治经济学博弈。
机器人会搬箱子了,然后呢?OmniRetarget最令人兴奋的不是让机器人学会了某个具体动作,而是改变了机器人学习动作的方式。传统方法需要针对每个任务精心设计奖励函数、调整参数、安排学习课程,整个过程像是手工作坊。而OmniRetarget只用5个通用奖励项和简单的领域随机化,就能让机器人掌握从跑酷到操作的多种技能。
这种范式转变意味着,人形机器人正在从"特定任务的自动化工具"向"通用场景的智能助手"演进。当机器人不再需要为每个新任务重新训练模型,它才真正具备了走出实验室的可能。
但现实依然骨感。演示视频中的G1在受控环境下完成30秒任务已属不易,真实工厂的流水线要求机器人连续工作8小时且故障率低于0.1%。仓储物流需要机器人在复杂货架间穿梭并精准抓取数百种不同形状的商品。家庭服务场景更是充满不可预测性——一个乱放的玩具、突然窜出的宠物、意外洒落的水渍,都可能让精密的运动控制算法陷入混乱。

成本也是绕不开的门槛。G1机器人的官方售价约为1.6万美元,这个价格足以雇佣多名工人完成同样任务。只有当机器人的综合成本(包括维护、能耗、软件更新)降至人工成本的50%以下,企业才会大规模采购。
王兴兴预测人形机器人在未来一两年内可以实现整理房间、端送物件等简单任务。这个时间表听起来乐观,却也透露出创业者的务实——先在低风险场景站稳脚跟,再逐步渗透到更复杂应用领域。
技术突破的真正意义,在于它揭示了什么回到那条10月3日凌晨刷屏的演示视频。当G1机器人爬上桌子又稳稳落地时,它完成的不仅是一个动作序列,更是对机器人控制范式的一次集中展示:
●从预编程动作库到基于数据保留的自适应控制
●从依赖视觉传感器到依靠本体感觉反馈
●从单一任务训练到通用技能迁移
这些技术进步最终指向一个问题:当机器人真的能像人一样灵活移动、精准操作时,它会改变什么?
也许是工厂流水线上那些重复性的体力劳动岗位,也许是仓库里搬运货物的年轻人,也许是餐厅里端盘子的服务员。自动化浪潮从来不是科幻小说里突如其来的"机器人革命",而是像OmniRetarget这样一个个技术节点的累积,在某个临界点突然爆发。
王兴兴2025年3月列入"浙江青年五四奖章"拟表彰人选,35岁的他站在了中国机器人产业最前沿。但他或许也明白,技术突破只是开始,如何让技术进步带来的红利更公平地分配,如何为被自动化替代的劳动者提供转型支持,如何在效率提升与社会稳定之间找到平衡——这些问题的答案,不在算法里,在更复杂的现实世界中。
宇树G1爬上了桌子,也爬上了风口。但风口过后,能留下什么,才是真正的考验。
参考资料
1.网易新闻《宇树 G1 人形机器人再进化:能爬桌子、搬凳子,美国团队新成果》,2025年10月3日
2.DoNews《宇树G1机器人实现爬桌搬凳等复杂动作》,2025年10月
3.新华网《宇树科技王兴兴:做一棵照亮别人的"科技树"》,2025年6月21日
4.维基百科《宇树科技》词条,最后更新2025年9月
5.腾讯新闻《宇树科技CEO王兴兴,浙江宁波人,90后因英语奇差无缘浙大...》,2025年1月27日
6.高工机器人产业研究所《2025年人形机器人产业发展蓝皮书》,新浪财经转载,2025年4月10日
7.TrendForce集邦咨询《预计中国市场2025年人形机器人本体产值将超45亿元》,OSCHINA转载
8.维基百科《王兴兴》词条,最后更新2025年8月
9.arXiv论文数据库《OmniRetarget: Interaction-Preserving Data Generation for Humanoid Whole-Body Loco-Manipulation》,2025年9月发布